
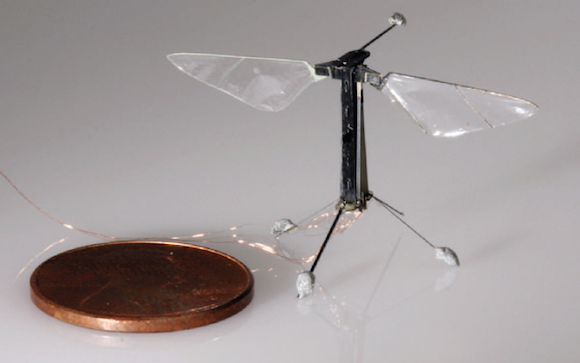
Científicos de la universidad de Harvard en estados unidos han anunciado la creación de un robot miniatura, el robot más pequeño del mundo, su nombre es RoboBee y su diseño está basado en el esqueleto de una abeja como lo indica su nombre, mide 3 cm aproximadamente desde una ala a la otra y pesa alrededor de 80 mg, el movimiento de las alas oscila entre los 100 y 120 veces por segundo. Además de su pequeño tamaño el robot cuenta con una micro cámara que recolecta imágenes, permitiendo esto que pueda ser utilizado para búsqueda y rescate en misiones en las que pueda ser difícil la utilización de helicópteros, aviones, drones, etc.
La realización de RoboBee tomo alrededor de 11 años aproximadamente en los cuales por medio de ensayo y error se consiguieron óptimos resultados. Como fue expuesto por la revista SCIENCE RoboBee no es un robot autónomo aun debido a que no existen baterías tan pequeñas como para serles incorporadas en su estructura, pero por el momento el robot se moviliza por medio de energía que se le transmite por medio de un cable diminuto junto con información codificada para el movimiento de las alas que son enviadas desde un computador principal.
Los siguientes avances en la tecnología según los creadores de RoboBee será la fabricación e implementación de un mini cerebro para que el robot pueda realizar las tareas que se le asignen y unas mini baterías para que pueda conseguir movimientos sin necesidad de la utilización de cables y extender la vida útil del mismo.
A pesar de las limitaciones que posee RoboBee por su peso y tamaño este puede sumergirse en el agua y salir de esta volando como si nada, siendo uno de los robots pioneros en vuelo y buceo simultaneo, el becario post doctoral del instituto Wiss Institute for biologically Yufeng Chen dice:
‘’Este es el primer micro robot capaz de moverse repetidamente dentro y fuera de entornos complejos’’, ‘’ diseñamos nuevos mecanismos que permiten al robot pasar directamente desde el agua al aire, algo que esta más allá de lo que la naturaleza puede lograr en el mundo de los insectos’’.
Una vez que el robot nada hacia la superficie del agua, esta agua se recoge dentro de una cámara de flotación ubicada en el cuerpo del robot, luego de eso una placa electrolítica produce oxihidrógeno que le da al robot una mayo flotabilidad y le permite empujar sus alas fuera del agua. La densidad que posee la superficie del agua mantiene al robot en una posición vertical cuando las alas comienzan a aletear. Esto ayuda a que cuando el oxihidrogeno se encienda como un combustible impulse al robot y le permita saltar fuera del agua.
Puesto a que la densidad del agua es mayor a la del aire, esto podía conllevar a que las alas del robot pudieran romperse dentro del agua. Los científicos buscaron la manera de que esto no sucediese y por medio de investigaciones encontraron una combinación al estilo locomotora multimodal, que al tocar el agua le advierte al RoboBee que debe bajar la frecuencia en sus aleteos y de esta manera no sufrir ningún daño en la estructura del robot.